Yeni Nəsil Robotlar: İnsanoid və Dronun Unikal İttifaqı
Caltech mühəndisləri, arxasından fırlanan dron buraxan humanoid robotdan ibarət multimodal robot sistemi inkişaf etdiriblər. Unitree G1 adlı humanoid robotun üzərində yerləşən M4 dronu, hərəkət və uçuş rejimləri arasında sərbəst şəkildə transformasiya etmək qabiliyyətinə malikdir. Bu, sadə bir çevrilmədən daha çox, fərqli mini transformerləri özündə birləşdirən "Soundwave" adlı Decepticon-u xatırladır.
Bu sistem, Caltech-in Muxtar Sistemlər və Texnologiyalar Mərkəzi (CAST) ilə Birləşmiş Ərəb Əmirliklərinin Abu Dabi şəhərində yerləşən Texnologiya İnnovasiya İnstitutu (TII) arasında üç illik əməkdaşlığın məhsuludur.
Transformasiya Edən Dron və Onun Hərəkət Qabiliyyətləri
İnsanoid robot kifayət qədər çevik hərəkət edərək pilləkənləri qalxa və dronu göndərdiyi hədəfə doğru irəliləyə bilir, baxmayaraq ki, bu, bir qədər yavaş sürətlə baş verir. CAST direktoru və Caltech-də aviasiya və mühəndislik professoru Aaron Ames bildirib: "Hazırda robotlar uça, idarə oluna və yeriyə bilirlər. Bütün bunlar müəyyən ssenarilərdə əladır. Lakin biz bu müxtəlif hərəkət modallıqlarını necə bir araya gətirərək vahid bir sistemə çevirə bilərik ki, hər birinin faydalarından yararlanaq və çatışmazlıqlarını aradan qaldıraq?"
Əsas çətinlik, komandanın müxtəlif robotları bir araya gətirməsində idi ki, onlar vahid bir sistem kimi fəaliyyət göstərsələr də, fərqli funksiyaları təmin edə bilsinlər. Dron CAST komandası tərəfindən Mory Gharib-in rəhbərliyi ilə hazırlanmış, humanoid robot isə Ames və onun laboratoriyası tərəfindən konfiqurasiya edilmişdir.
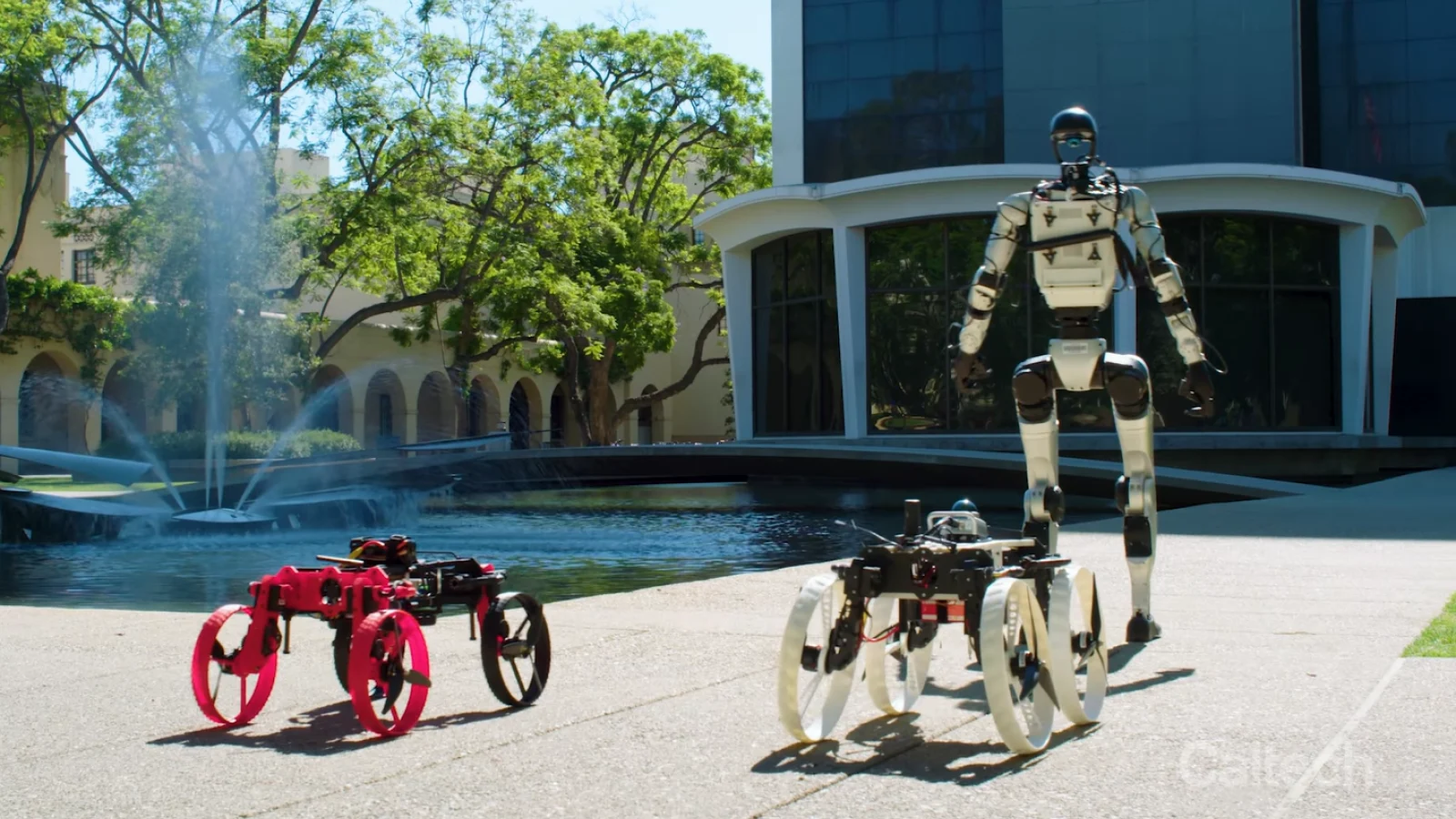
M4 dronu öz gövdəsini bir neçə müxtəlif hərəkət növünə uyğunlaşdıra (transformasiya edə) bilir. O, daxil olmalı olduğu mühiti qiymətləndirərək ən effektiv hərəkət kombinasiyalarını avtomatik olaraq seçə bilər. M4 dörd təkər üzərində yuvarlana, təkərlərini rotorlara çevirərək uça, iki təkər üzərində "meerkat" üslubunda dayana, təkərlərini ayaq kimi istifadə edərək "yeriyə", iki rotordan istifadə edərək dik yamaclarda iki təkər üzərində qalxa və ya sadəcə təyinatına doğru yuvarlana bilər.
M4-ün qollarını təkər, ayaq və ya mühərrik kimi istifadə etmək qabiliyyəti əsas xüsusiyyətdir. M4-ün uçması lazım olduqda, dörd təkər qatlanır və pərvanələr robotu yerdən – yaxud M4-ü işə saldıqda qabağa əyilən humanoid robotun arxasından – qaldırır.
Muxtar Sistemlərdə Təhlükəsizlik və Etibarlılıq
Bu əməkdaşlığın əsas məqsədi belə muxtar sistemləri daha təhlükəsiz və etibarlı etməkdir. Aaron Ames qeyd edir ki, ətrafımızda robotların olmasını istəyiriksə, onların etibarlılığını təmin etmək üçün daha çox iş görülməlidir. "Biz təhlükəsizlik-kritik idarəetmə, sistemlərimizə etibar edə biləcəyimizə əmin olmaq və onların təhlükəsizliyini təmin etmək barədə düşünürük" deyə Ames vurğulayıb. O əlavə edib: "Bu, bütün bu fərqli avtonomiya aspektlərini öyrənən bir çox layihələrimiz var və bu problemlər həqiqətən böyükdür. Bu fərqli layihələr və əməkdaşlığımızın müxtəlif aspektləri sayəsində biz daha böyük problemləri həll edə və avtonomiyanı əhəmiyyətli və məqsədyönlü şəkildə inkişaf etdirə bilirik."
Oxucu Şərhləri
Hələlik heç bir şərh yazılmayıb. İlk şərhi siz yazın!
Şərh Yaz